
About me
I am a research assistant at the Shanghai AI Lab. From May 2024, I have participated in research on embodied intelligence and published papers at the Shanghai AI Lab. I have implemented our research on Flexiv, xArm, and humanoid robots (GR-1). I completed my M.Sc. in Automotive Systems at the Technical University of Berlin in December 2023. During my master's degree, I participated in a number of cooperation projects between schools and laboratories, and interned at the German IAV company for one year.
Education and Experience
- Shanghai AI Lab, RA, 2024
- Ingenieurgesellschaft Auto und Verkehr, Intern, 2022
- Technische Universität Berlin, Master, 2021
- Technische Universität Dresden, Master, 2020
- Nanjing University of Science and Technology, Bachelor, 2015
Projects
- Develop imitation-based algorithms tailored for humanoid robotics and implement them within the GR-1 robotic platform, Shanghai AI Lab, 2024
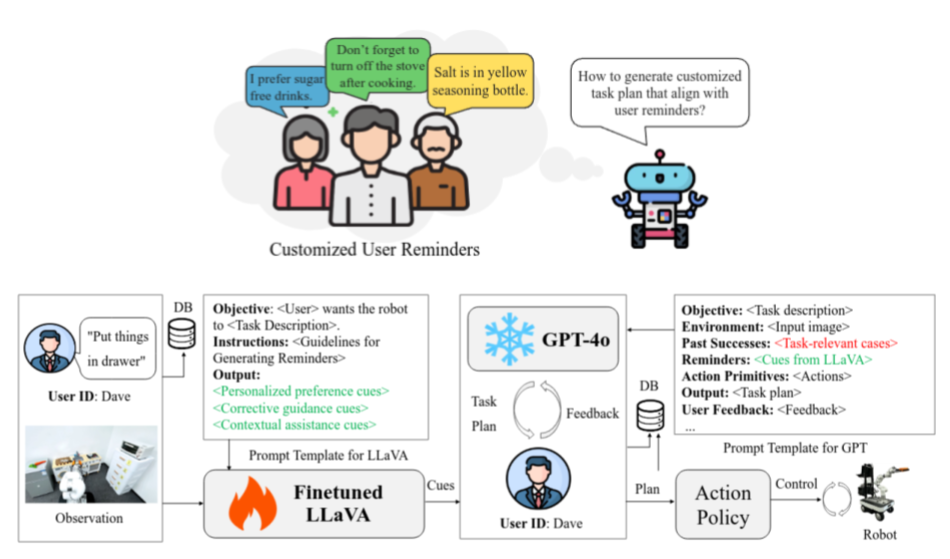
- Develop VLM-powered task planning algorithms that align household robots effectively with user-defined reminders, Shanghai AI Lab, 2024
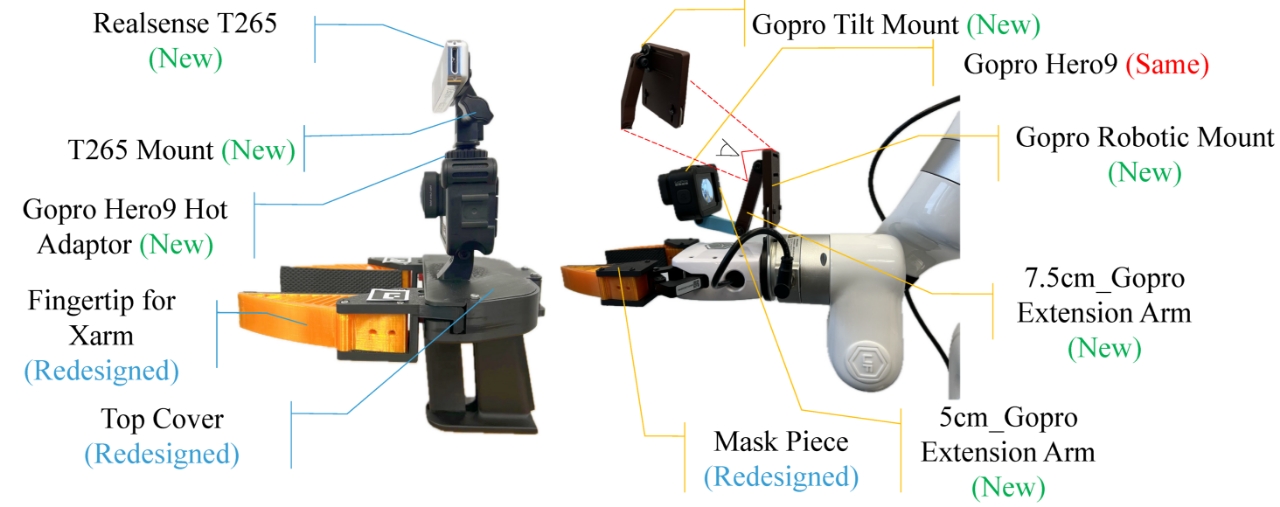
- Construct hardware frameworks, like UMI, to support manipulation data collection for imitation learning applications, Shanghai AI Lab, 2024
- Design and optimize imitation-based and servo-based skill policies to enhance robotic arm actions, ensuring precision and speed, Shanghai AI Lab, 2024
- Fine tuning of machine learning based image analysis, DCAITI Lab, Germany, 2023
- Implementierung von ETSI ITS-G5-Nachrichten in CARLA, IAV, Germany, 2022
- Imitation learning on small-autonomous car, Tu-berlin DAI-Labor, Germany, 2022
- Environment mapping and indoor localization using a visual slam algorithm for autonomous valet parking, Expleo, Germany, 2021
- PHM software development, Tu-berlin, Germany, 2021
Publications
Ziniu Wu*, Tianyu Wang*, Zhaxizhuoma*, Chuyue Guan**, Zhongjie Jia**, Shuai Liang**, Haoming Song, Delin Qu, Dong Wang, Zhigang Wang, Nieqing Cao, Yan Ding#, Bin Zhao#, Xuelong Li
Technical ReportIn this work, we introduce Fast-UMI, an interface-mediated manipulation system comprising two key components: a handheld device operated by humans for data collection and a robot-mounted device used during policy inference. This system offers an efficient and user-friendly tool for robotic learning data acquisition.
Zhaxizhuoma*, Pengan Chen*, Ziniu Wu*, Jiawei Sun, Dong Wang, Peng Zhou, Nieqing Cao, Yan Ding# Bin Zhao, Xuelong Li
Under ReviewThis paper presents AlignBot, a novel framework designed to optimize VLM-powered customized task planning for household robots by effectively aligning with user reminders. AlignBot employs a fine-tuned LLaVA-7B model, functioning as an adapter for GPT-4o. This adapter model internalizes diverse forms of user reminders—such as personalized preferences, corrective guidance, and contextual assistance into structured instruction-formatted cues that prompt GPT-4o in generating customized task plans.

Kai Gao*,Zhaxizhuoma*, Shiqi Zhang, Jingjin Yu
Under ReviewIn this research, we propose ORLA*, which leverages delayed (lazy) evaluation in searching for a high-quality object pick and place sequence that considers both end-effector and mobile robot base travel.
Robotic Demos
Humanoid robot Demo
AlignBot Demos
FLASH
Fast Learning and Servoing for High-precision Domestic Manipulation Tasks